
El proyecto PAVE-SCAN tiene como objetivo construir una tecnología impulsada por IA basada en EGNSS para evaluar pavimentos de carreteras con alta precisión y bajo costo, mejorando la seguridad del conductor y la operación y mantenimiento de la red de carreteras.
El mantenimiento, el rendimiento y la seguridad de la infraestructura vial son preocupaciones críticas para la sociedad moderna. Los crecientes volúmenes de tráfico, la rápida urbanización y el envejecimiento de la infraestructura están aumentando la necesidad de métodos eficientes y escalables para monitorear el estado del pavimento. Detectar el deterioro de la superficie (grietas, rugosidades, baches, deformaciones, etc.) en una etapa temprana permite un mantenimiento oportuno, reduce los costos operativos y aumenta la seguridad. Los enfoques de inspección tradicionales, incluidas las inspecciones manuales y los vehículos de inspección especializados, son costosos, requieren mucha mano de obra y son difíciles de realizar con frecuencia o a través de grandes redes.
PAVE-SCAN y la tecnología PAVE-SENS derivada abordan este desafío a través de una solución escalable, de bajo costo y habilitada para IA para la evaluación continua del pavimento. Financiado por Horizonte Europa y apoyado por la Agencia del Programa Espacial de la Unión Europea (EUSPA), el proyecto combina tecnologías de detección de bajo costo, posicionamiento basado en GNSS y análisis basados en datos para monitorear las condiciones de las carreteras con alta resolución y frecuencia. Al aprovechar los vehículos que ya están en la carretera, este proyecto proporcionará información amplia y casi en tiempo real sobre el estado del pavimento.
PAVE-SCAN tiene como objetivo evolucionar más allá de las tecnologías de inspección tradicionales y permitir que las agencias públicas y los operadores tomen decisiones informadas, optimicen los ciclos de mantenimiento y mejoren la accesibilidad y seguridad de la red.
Propósito del proyecto
PAVE-SCAN persigue cinco objetivos principales:
Desarrollar una plataforma integrada de hardware y software utilizando posicionamiento GNSS europeo y sensores de bajo coste (sensores de vibración, giroscopios, unidades OBD, etc.). Está impulsado por algoritmos de aprendizaje automático y visión artificial para la detección y clasificación automática de daños en el pavimento. Permitir el monitoreo de pavimentos a través de la recopilación participativa de datos utilizando vehículos municipales, vehículos de mantenimiento de carreteras, vehículos de transporte público y potencialmente vehículos ciudadanos. Demostrar y validar la plataforma mediante implementaciones piloto a gran escala y alcanzar la madurez cercana al mercado (TRL8-9) al finalizar el proyecto. Proporciona un sistema que admite el monitoreo continuo de toda su red para mejorar la planificación de la infraestructura, las intervenciones centradas en la seguridad y la asignación de mantenimiento prioritario. Al aumentar la transparencia y la accesibilidad de la información sobre el estado de las carreteras, brindamos valor a los gobiernos locales, las agencias gubernamentales, los operadores de transporte y el público.
Importancia, innovación y alineación con la política de la UE
PAVE-SCAN representa una transición de estudios poco frecuentes y costosos a una gestión de pavimentos continua basada en datos. Su enfoque está en consonancia con las prioridades de transformación digital de la UE, en particular:
Impulsar la adopción de tecnologías basadas en GNSS (Galileo y EGNOS). Apoyar el desarrollo sostenible de las redes de transporte. Mejorar las capacidades de gestión de activos a largo plazo. Corregir la disparidad entre municipios con altas y bajas capacidades tecnológicas.
El diseño de arquitectura abierta del proyecto permite la interoperabilidad con los sistemas de gestión de pavimentos existentes, la integración en la infraestructura digital municipal y una posible escala comercial. PAVE-SCAN fomenta la innovación, el emprendimiento y los servicios de movilidad inteligente estimulando modelos de monitoreo basados en servicios y aplicaciones posteriores de GNSS e IA.
metodología

Esta metodología (Figura 1) integra herramientas de detección modernas con análisis avanzados y marcos de toma de decisiones geográficas.
Posicionamiento y georreferenciación basados en GNSS
Utilizando receptores GNSS europeos, las observaciones de los sensores (como las firmas de vibración de los vehículos) se georreferencian con precisión. Esto es esencial para localizar espacialmente defectos, correlacionar anomalías con segmentos físicos de la carretera y respaldar operaciones de mantenimiento posteriores. Sensores de bajo costo y detección participativa
PAVE-SCAN reemplaza plataformas especializadas con sensores asequibles instalados en flotas existentes. Estos incluyen sensores de vibración y giroscopio, transmisiones OBD y posiblemente cámaras o LiDAR para permitir un monitoreo continuo en condiciones operativas del mundo real. Aprendizaje automático y análisis de visión artificial.
Los modelos de IA clasifican defectos del pavimento, identifican patrones de rugosidad e infieren tendencias de deterioro. El diseño modular permite la expansión a nuevos tipos de carreteras, regiones climáticas o requisitos de confiabilidad. Herramientas de integración SIG y soporte a la toma de decisiones.
Las anomalías detectadas se capturan en un sistema de gestión de pavimentos basado en GIS que le permite: Priorizar la remediación. Planes de mantenimiento optimizados para ajustarse a su presupuesto. Monitoreo dinámico de la degradación en el tiempo. Introducción de prueba como laboratorio de vida urbana.
La validación se llevará a cabo en Chipre, Malta, España, Italia y Estonia. Cada ubicación ofrece características de infraestructura, perfiles de vehículos, dinámica de tráfico y variaciones climáticas únicas, lo que mejora la transferibilidad y generalización de nuestros resultados.
Principales logros y contribuciones
El trabajo hasta ahora en este proyecto ha demostrado la viabilidad y el potencial disruptivo del monitoreo de pavimentos de bajo costo y colaborativo.
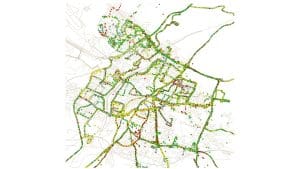
Al combinar sensores de vibración a bordo con cámaras y posicionamiento GNSS, se pueden identificar de manera confiable las irregularidades de la superficie del pavimento. La evaluación de carreteras a nivel de punto conduce a una evaluación a nivel direccional y a nivel de calles y a un mapeo de la red de carreteras (usando SIG), complementado con videos/imágenes de apoyo, y el conjunto de datos subyacente procesado por ML forma la base del sistema de gestión de pavimentos (Figura 2). La detección de la degradación de la condición se correlaciona bien con las métricas de rugosidad utilizadas en los marcos de gestión de pavimentos existentes. La ampliación a través de la detección participativa permite actualizaciones frecuentes a una fracción del costo de las encuestas profesionales. El proceso de análisis transforma las señales sin procesar de los sensores en un índice de condición de la superficie e información etiquetada con la ubicación adecuada para paneles de control de infraestructura basados en SIG y sistemas de gestión de pavimentos. La implementación piloto confirmará la reproducibilidad en diferentes tipos de vehículos y entornos viales, y el algoritmo se volverá a entrenar para lograr una mejora continua.
Otros desarrollos mejorarán la automatización de la clasificación de defectos a través de módulos de visión artificial, permitiendo el uso de imágenes de cámaras para detectar grietas, baches o superficies deshilachadas. El trabajo paralelo explorará análisis predictivos para estimar el deterioro futuro y respaldar la programación de mantenimiento preventivo en lugar de reparaciones reactivas.
Estos avances presentan un claro potencial disruptivo y demuestran que los enfoques de sensores basados en IA de bajo costo pueden respaldar significativamente las operaciones de mantenimiento municipal.
Perspectivas y actividades futuras
La plataforma PAVE-SCAN avanza hacia la demostración a gran escala y la entrada al mercado, y los pasos futuros incluyen:
El entorno piloto aporta un denso conjunto de datos reales sobre el terreno. El sistema se instalará progresivamente en vehículos municipales, vehículos de transporte público y departamentos de servicios viales.
Detección mejorada La integración de visión artificial y fusión de múltiples sensores extiende la detección más allá de la rugosidad para incluir defectos visuales e indicadores de deterioro estructural. Monitoreo en tiempo real El paso de cargas de datos asíncronas a interfaces casi en tiempo real mejora la capacidad de respuesta de la gestión de activos en vivo. Comercialización Este proyecto tiene como objetivo proporcionar un servicio modular adecuado para municipios y autoridades de movilidad, agencias de gestión de infraestructura subcontratadas y entornos de gemelos digitales de ciudades inteligentes. Los esfuerzos de estandarización y adopción en toda la UE se centrarán en la gobernanza de datos, las prácticas de privacidad, la interoperabilidad y los formatos armonizados de informes sobre el estado de las carreteras.
Consorcio y ejecución del proyecto.
El consorcio, coordinado por la Universidad de Chipre, incluye 13 socios de siete países de la UE y reúne a instituciones académicas, proveedores de tecnología, operadores de transporte, autoridades locales y organismos de comercialización de innovación. Esta composición interdisciplinaria permite un camino hacia una tecnología superior, validación de dominios y difusión a largo plazo.
El proyecto se ejecutará desde enero de 2024 hasta diciembre de 2026 y apunta a resultados listos para implementar a través de una plataforma digital integrada de hardware y software.
Confirmar financiación

PAVE-SCAN está financiado por el programa Horizonte Europa (acuerdo de subvención número 101131910) con el apoyo de EUSPA, con un presupuesto total de aproximadamente 3 millones de euros.
Este artículo se publicará en un próximo número de Special Focus Publication.
Tenga en cuenta: Este es un perfil comercial.
Source link